
机器人智能感知与自主作业团队
一、团队简介
团队致力于突破多模态仿生感知技术,重点开展机器人视觉、触觉、听觉等仿生传感器研发及具身智能仿生机器人系统研究工作,团队研究面向国家基建安全、水利安全和人民生命健康等重大战略需求,为提升国家基础设施安全保障能力和人民健康水平提供智能化解决方案。目前团队成员40余人,包括硕导/博导科研教师3人、博士后2人、工程师3人,博士、硕士研究生30余人。
二、团队核心成员及联系方式
姓名 |
岗位、职责 |
联系方式 |
石青 |
责任教授 |
shiqing@bit.edu.cn |
于志强 |
属地负责人/联系人 |
zhiqiangyu@bit.edu.cn |
陈学超 |
核心成员 |
chenxuechao@bit.edu.cn |
三、团队创新成果
1.害堤獾洞探测机器人

堤坝作为我国水利工程防洪减灾的重要组成部分,在南水北调、防洪、灌溉、航运、发电、水产养殖及生态环境改善等方面,发挥着无可替代的重要作用。獾、狐等动物在堤坝筑巢、修道、繁殖,对水利工程内部结构造成破坏,极易诱发渗透、跌窝等险情,甚至会造成垮坝、崩堤等事故,给水库大坝、堤防等水利工程的安全运行带来重大风险隐患,对人民生命财产安全和社会经济稳定构成严重威胁。
针对堤坝内部害堤獾洞难以深入探测的难题,团队研发了害堤獾洞仿生探测机器人,该机器人解决了现有轮式或履带式管道机器人因体积大、抓地力不足、地形适应性差而无法在獾洞狭窄、湿滑、多障碍环境中有效探测的难题。害堤獾洞仿生探测机器人采用了对称螺旋推进,螺旋齿形嵌入土层提升抓地力,可攀爬陡坡,并适应软土、硬土、树根、石块、沙地等复杂地形。机器人通过主/被动柔性腰结构已具备前进、后退、横滚、摆动等10种运动模态,直径仅11厘米,适应獾洞20-80厘米的地下复杂地形洞穴探测需求。
2.面型智能制造应用的双臂协同操作机器人

智能制造场景下的双臂协同操作机器人致力于通过智能感知与协同控制提升工业生产的智能化水平。目前已在多个应用方向取得关键进展:在机器人销钉装配方面,基于高精度机器视觉实时检测孔位,引导机器人完成精准插入,显著提升装配精度与效率;在胶块缺陷处理方面,创新引入红外图像分析技术,实现对制造缺陷的可靠检测,并结合机器人执行系统完成自动化剔除;在汽车零部件分拣方面,研发了基于GraspNet的自主抓取系统,能够在杂乱环境中稳定识别并抓取目标零件,展现非结构化场景下的作业能力。未来,团队将持续围绕双臂机器人在智能制造场景中的复杂作业任务需求展开深入研究,致力于构建更柔性、智能、可靠的机器人解决方案,为产业智能化升级提供核心技术支撑。
3.手功能精细运动康复训练机器人

设备面向脑卒中、神经损伤导致的手部运动功能障碍患者,通过镜像协同训练和力反馈技术,精准、安全地辅助患者进行康复训练。团队基于双向力控系统的镜像训练外骨骼机器人,实现了健侧手与患侧手的动态耦合控制。通过高精度编码器实时采集健侧运动数据,经自适应算法解析后驱动患侧机械手同步复现动作,并利用力反馈动态调节输出力矩,避免二次损伤。该技术突破了传统单侧训练和镜像疗法的局限,融合了镜像疗法与闭环力控技术,能模拟自然运动时序,支持单指或多指差异化训练,适配多种手部病症。
4.混凝土劣质骨料智能检测装备

为保障混凝土工程质量,团队成功研发了一套基于图像分析技术的混凝土劣质骨料快速检测系统。该系统专注于精准识别骨料中的钢渣与贝壳等有害杂质,可在20分钟内完成对样品的快速检测,并能准确判定其中钢渣或贝壳的含量是否超过1%的临界值。该系统适应性广,对我国不同地域砂石骨料的识别准确率不低于97%。目前设备已实现在混凝土搅拌站的安装应用,在显著提升检测效率的同时,为我国基础设施建设的材料安全提供了有力保障。
5.电动推杆智能I-V-F测试仪

电动推杆I-V-F(电流-电压-压力)测试仪,通过硬件与软件协同设计实现了高精度同步电流-电压-压力数据采集、多模式数据处理及云端互联功能。测试仪工作模式模块根据网络与存储状态自动切换四种运行模式(云端+本地、纯云端、纯本地、实时显示),确保了数据完整性,智能选择模块通过多因素算法动态优化工作逻辑,实现智能决策。系统整体尺寸紧凑,功耗低于5W,支持-10℃~60℃宽温环境,填补了便携式电动推杆多参数一体化测试设备的技术空白。
测试仪已应用于工业自动化、智能家居领域的电动推杆性能测试场景,其便携特性支持移动式抽检,实时反馈推杆压力-电流-电压曲线,助力良品率提升10%,并结合历史云端数据分析寿命周期,使维护响应效率提高20%。
6.压电叠堆式高频变形镜
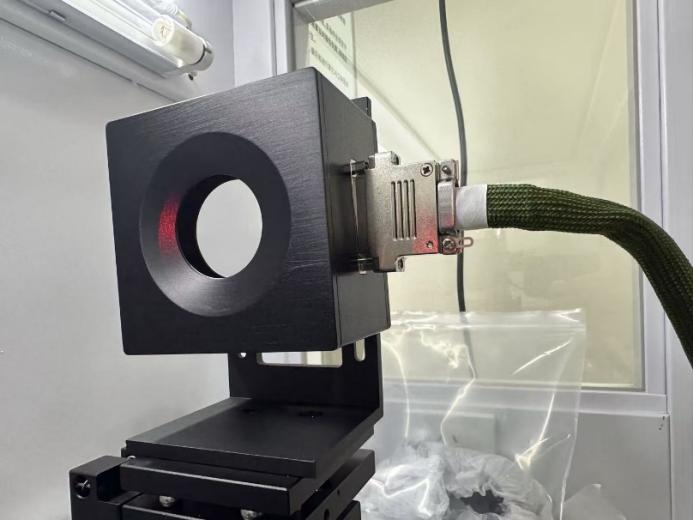
为满足自适应光学系统对波前校正器高带宽与高精度的迫切需求,本研究团队致力于压电叠堆式高频变形镜系统的研发。所研制的叠堆式变形镜课通过可变形镜面、连接柱及压电驱动器等核心组件的协同作用,实现了镜面的高精度、高线性度动态形变控制。变形镜采用25个阵列驱动单元,在26.4mm的有效矫正口径上实现了单点超过10μm的最大变形量。通过创新性地优化压电驱动器的布局与出力结构,系统响应频率得到显著提升,为大气湍流校正等高端应用提供了高性能的实时波前调制解决方案。
