智能机动平台团队
一、团队简介
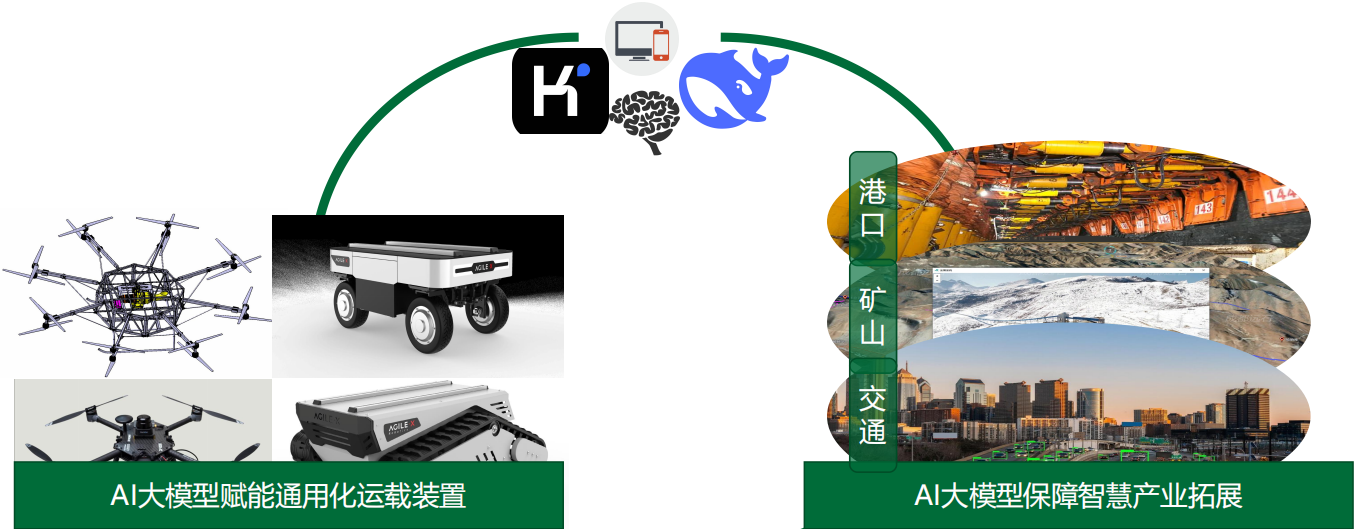
团队以一套模块化可重构智能系统基座为核心,深度赋能智能底盘、飞行器与机械臂三大平台,并逐步沉淀出声光电磁感知、任务规划、通用大模型、组合惯导等N项关键技术,构建了“1+3+N”技术基座,依托该技术基座形成以模块化可重构为特点的技术发展体系。
二、团队核心成员及联系方式
| 姓名 | 岗位、职责 | 联系方式 |
| 刘国盛 | 属地负责人 | dasheng_lgsh@163.com |
三、科研成果
科研项目
(1)海港应急救援与港区巡检——内河港池专业无人机及搜救应急研发项目
基于现有船舶救援应急系统,融合无人机技术,解决传统人工搜救存在的漏判、低效、抛投偏差等问题。构建智能化、高效化的水上应急救援体系,满足复杂海况、恶劣天气等特殊条件下的快速响应需求。
通过多传感器信息融合实现SLAM定位以应对港口区域设备遮挡导致的GPS信号丢失问题。利用5G通信、专网双链路冗余设计,结合主动信号搜寻规划以解决通信链路中断问题。


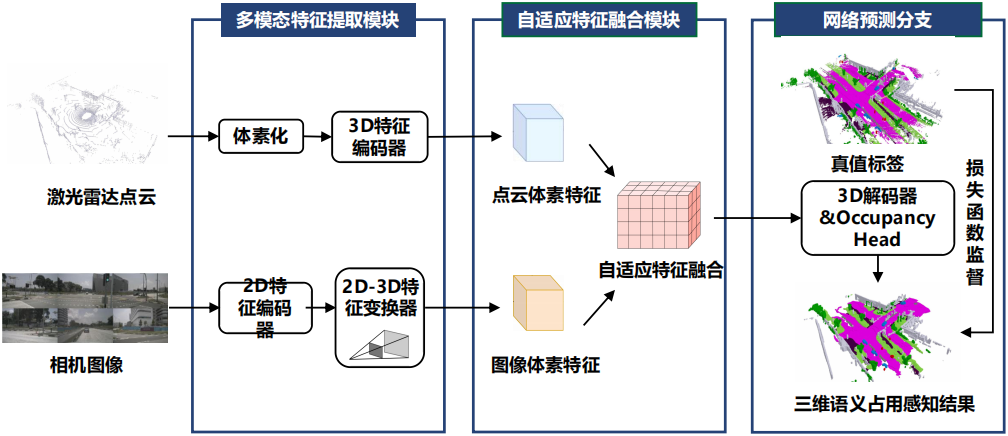
(2)越野路面地图重建与异形障碍识别技术
在抢险救援、偏远地区工业作业等场景中,越野车辆需应对复杂路况,人工驾驶易出错且效率低,迫切需要自动驾驶技术提升运行效能与安全性。
在越野环境下作业的复杂场景,设计多模态融合的三维占据预测网络,提出一种自适应特征融合模块,生成可行驶区域划分的语义机动地图。
(3)通用大模型技术应用
本团队聚焦大模型应用,结合行业痛点,部署于通用化运载装置,以实现具身智能工业场景落地。主要应用案例如下:
基于多模态大模型的数据自动结构化清洗技术研究:数据输入端支持PDF检测报告/Word文档/图片文件等多种格式数据,有效解决文档解构、图像增强、上下文关联等等问题。
面向智驾领域的OCC网络模型蒸馏:越野场景下需要在边缘端部署模型,既要满足精准识别的要求,又要适应算力有限的条件,为保证在有限算力的工况下,采用模型蒸馏技术,可以大幅降低算力需求,保障实时性。
基于通用大模型的目标检测技术研究:传统的目标检测方法存在小目标检测难、密集目标漏检、多尺度适应差等问题,通用大模型技术因其精度高、速度快、泛化强的特性,可实现上述问题的定向攻克。
论文发表