
智能农机团队
一、团队简介
北京理工大学智能农机团队致力于拖拉机智能化控制,实现拖拉机和农机的高效智能化,主要开展整机控制器(VCU)、无人驾驶控制器(SDC)和智能农机新能源底盘的开发研究,助力农机转型升级和农业智慧化。团队技术顾问为朵英贤院士,现有教师3人,团队拥有博士后2人,博士3人,硕士7人。团队负责人为张幽彤教授,属地联系人翟涌副教授。
二、团队核心成员及联系方式
姓名 |
岗位、职责 |
联系方式 |
张幽彤 |
责任教授,属地负责人 |
youtong@bit.edu.cn |
翟涌 |
属地联系人 |
Zhaiyong@bit.edu.cn |
三、团队创新成果
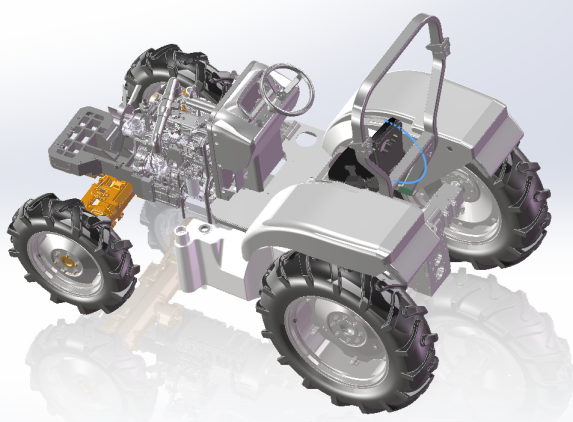
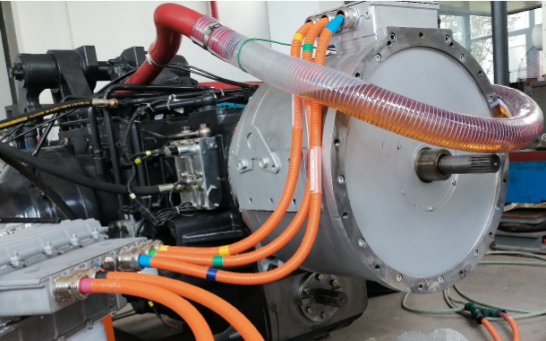
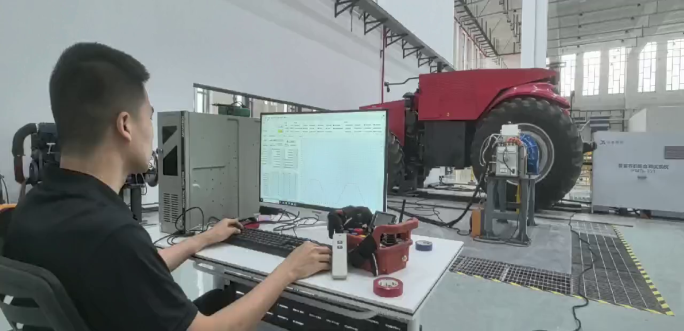
团队率先提出双流耦合混合动力系统构型,并完成了300马力拖拉机的样机开发。以及70马力增程式和10马力纯电动拖拉机的开发。建有300千瓦大马力拖拉机5轴综合测试系统。



[1] Wei H, Zhang N,ZhangY*, et al. Deep reinforcement learning based direct torque control strategy for distributed drive electric vehicles considering active safety and energy saving performance[J]. Energy, 2022.
[2] Wei H, Ai Q, ZhangY*, et al. Modelling and experimental validation of an EV torque distribution strategy towards active safety and energy efficiency[J]. Energy, 2022.
[3] Wei H,Zhong Y*, Fan L, et al. Design and validation of a battery management system for solar-assisted electric vehicles[J]. Journal of Power Sources, 2021.
[4] Fan L,Zhang Y*, Dou H, et al. Design of an integrated energy management strategy for a plug-in hybrid electric bus[J]. Journal of Power Sources, 2020.
[5] Yang Y,Zhang Y*, Tian J, et al. Adaptive real-time optimal energy management strategy for extender range electric vehicle[J]. Energy, 2020.
[6] 窦海石,张幽彤*,等.面向耦合分流动力构型的拖拉机犁耕工况控制策略[J]. 农业工程学报,2022,38(23).
[7] 窦海石,张幽彤*,等.双流耦合构型混合动力拖拉机旋耕工况控制策略研究[J]. 农业机械学报,2024,55(02):393-400+414.
